


June 2017 – May 2018
In June 2017 SIMOC was selected as one of twelve funded Pilot Projects for the Interplanetary Initiative. Starting in July, ASU SESE undergraduate student Tyler Cox developed the foundational agent-based model (ABM) for SIMOC. Built upon the Python MESA library, this ABM integrated a 2D map with astronauts planting and consuming wheat.
Even this initial, simple system made clear that an ABM would generate the kind of complex behavior desired. At the same time, project leads Kai Staats, Danny Jacobs, and Judd Bowman developed concepts for how to integrate entropy—the degradation of modeled systems over time in order to take into account an essential, non-linear function that in many ways defines the limitations and challenges of real-world closed ecosystems.
In late September 2017 an ASU Computer Science Capstone team was engaged, with then senior undergraduate students Ben McCord, Greg Schoberth, Thomas Curry, Yves Koulidiati, and Terry Turner joining SIMOC. October and November saw exploration of concepts for how to build the model with emphasis on the user interface and game-play experience. Many of these concepts were knowingly beyond the reach of the immediate funding and time-frame but helped to establish a conceptual model for how SIMOC might unfold over multiple phases of development, as noted in this document.
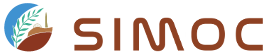
Based upon an initial literature review, the work of Dr. Ray Wheeler, NASA Kennedy, and input from the SIMOC team, Kai developed an agent interaction diagram (above) which worked to unify concepts for the interconnected nature of a scalable, combined physico-chemical ECLSS (environmental control and life support system) and bioregenerative (living plant) system for human habitation.
December saw first code development, with both the ABM and dashboard frameworks initiated. Early 2018 found an ABM fully integrated into the SIMOC back-end. It was initially deemed appropriate to develop SIMOC within the Unity 3D gaming framework to provide the greatest functionality. However, in late January it was determined this approach was overkill, and a rebuild with a Javascript web front-end proved to be the fastest route to a more portable, scalable product. Experimentation with several Javascript graphical libraries provided valuable experience for Phase II.
While the switch from Unity to Javascript saw the loss of two weeks effort, it set in motion the rapid development and private deployment of a functional ABM that included several agents and interactions: solar electric power generation, storage, and consumption; humans and plant interactions with CO2, O2, water, edible biomass (food), and the passage of time.
While there were a few virtual leaks and band-aids applied, SIMOC was demonstrated and met with praise at the quarterly March 2018 Interplanetary Initiative meeting. Phase I concluded with the close of the ASU semester, May 2018.


Evolution of a paradigm
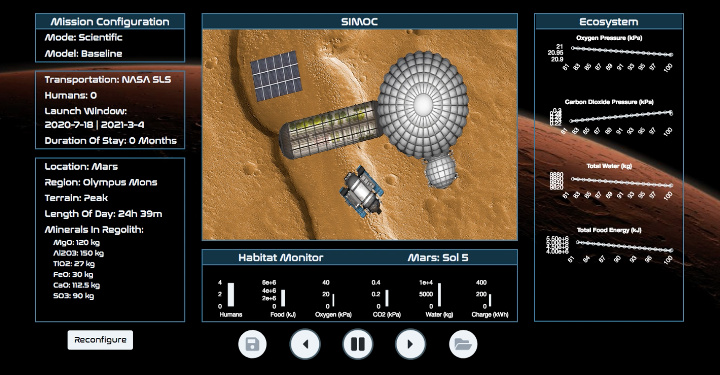
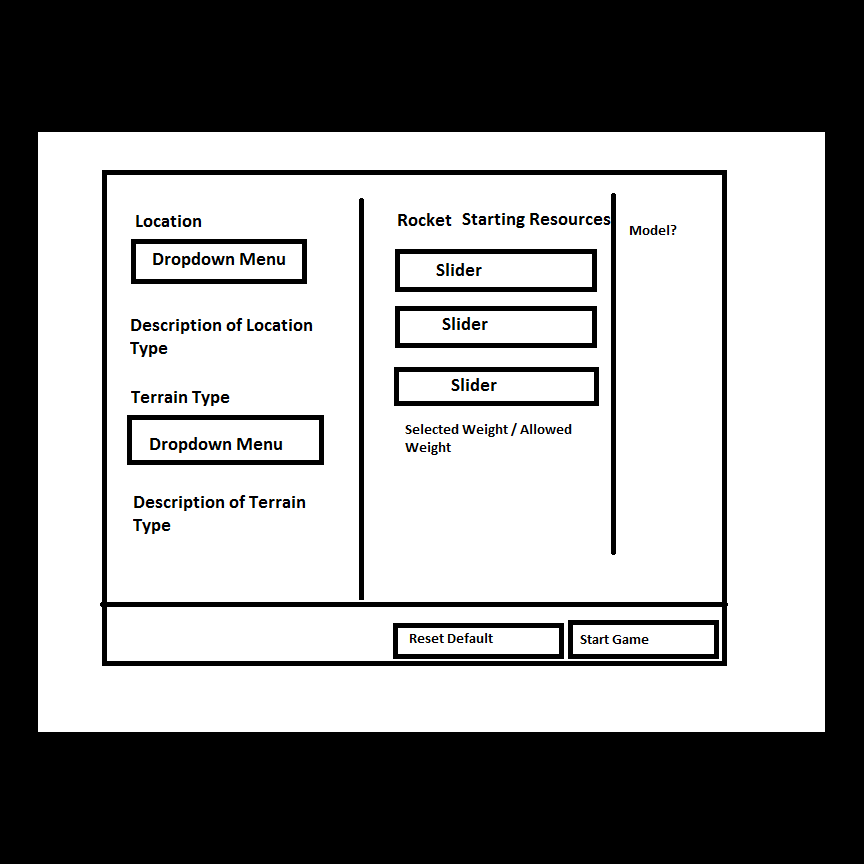
The SIMOC Configuration Wizard engages users with a brief introduction to each aspect of SIMOC configuration, and then the available options for that parameter. In Phase I development, emphasis was placed on the location of the simulated habitat, in low-Earth orbit, on the Moon, in free space, or on Mars. Attention was given to specific locations, such as a valley, mountain top, or polar cap as each would inherit a particular in situ resource utilization (ISRU) parameter. In each setting the habitat itself maintained a relatively stable internal configuration of human inhabitants, structures, and ECLSS functions based upon what was to have been a real-world baseline.
With Phase II, knowledge of the complexities of both physico-chemical ECLSS and bioregenerative systems grew within the SIMOC team, making it clear that SIMOC should instead focus on internal habitat configuration—not the location of the modeled habitat deployment. Future versions of SIMOC will return to the ISRU of location, incorporating both internal and external parameters, and providing an even more robust model and learning environment.